 ***
**加载完毕:**
#### 5. 修改配置
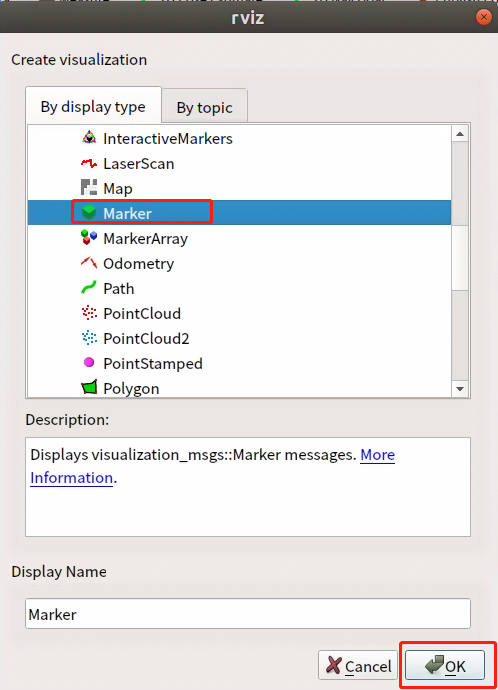
##### 1) 新增 marker (目标点标记)
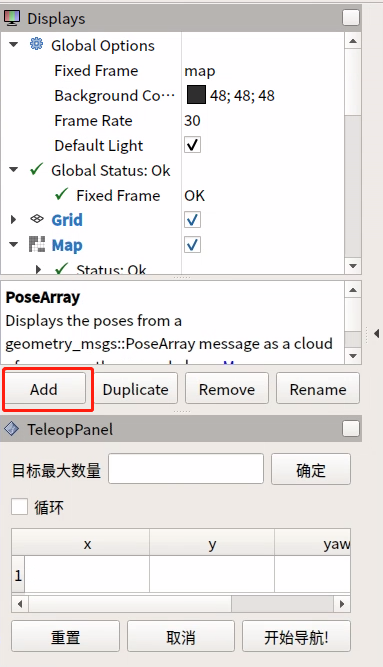
RViz 左侧 Display -> add -> Marker
***
**加载完毕:**

#### 5. 修改配置
##### 1) 新增 marker (目标点标记)
RViz 左侧 Display -> add -> Marker
 ***
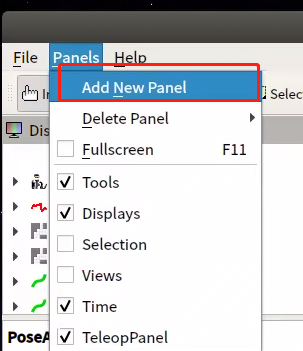
##### 2) 修改 2D Nav Goal 按钮话题
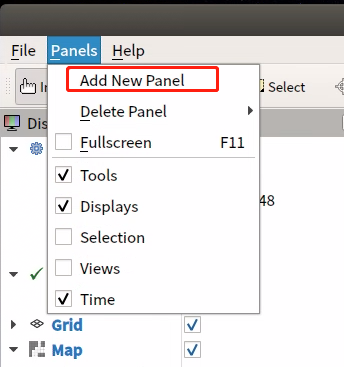
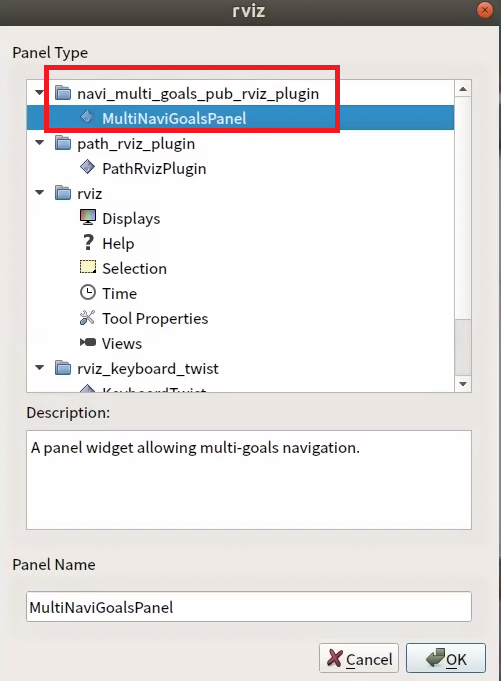
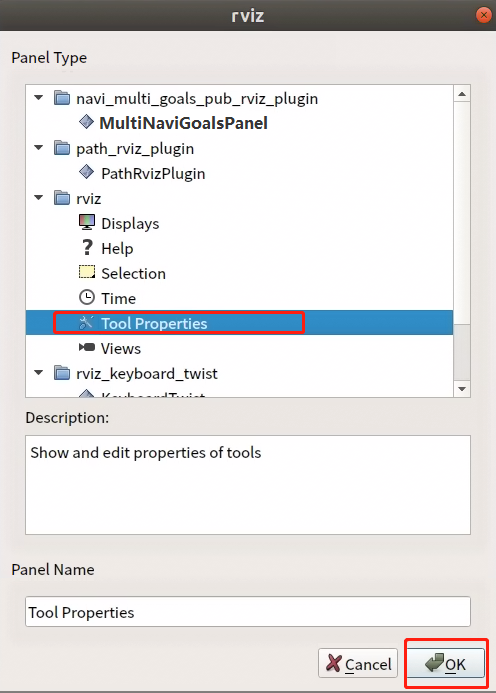
RViz 的左上角 Panels->Add New Panel-> Tool Property
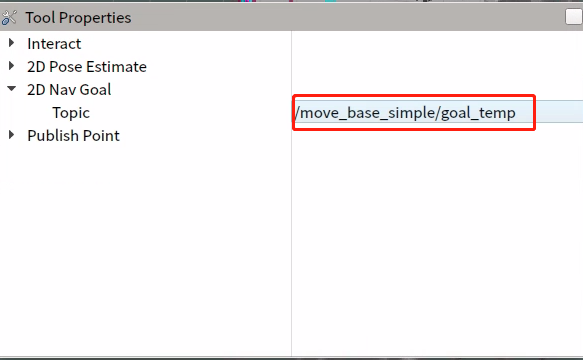
将 2D Nav Goal -> Topic 修改为 /move_base_simple/goal_temp
***
##### 2) 修改 2D Nav Goal 按钮话题
RViz 的左上角 Panels->Add New Panel-> Tool Property
将 2D Nav Goal -> Topic 修改为 /move_base_simple/goal_temp
 ***
**做完以上操作后 Ctrl + S 保存 RViz 配置,如忘记保存,则下次进来要重复操作。**
### 二、使用
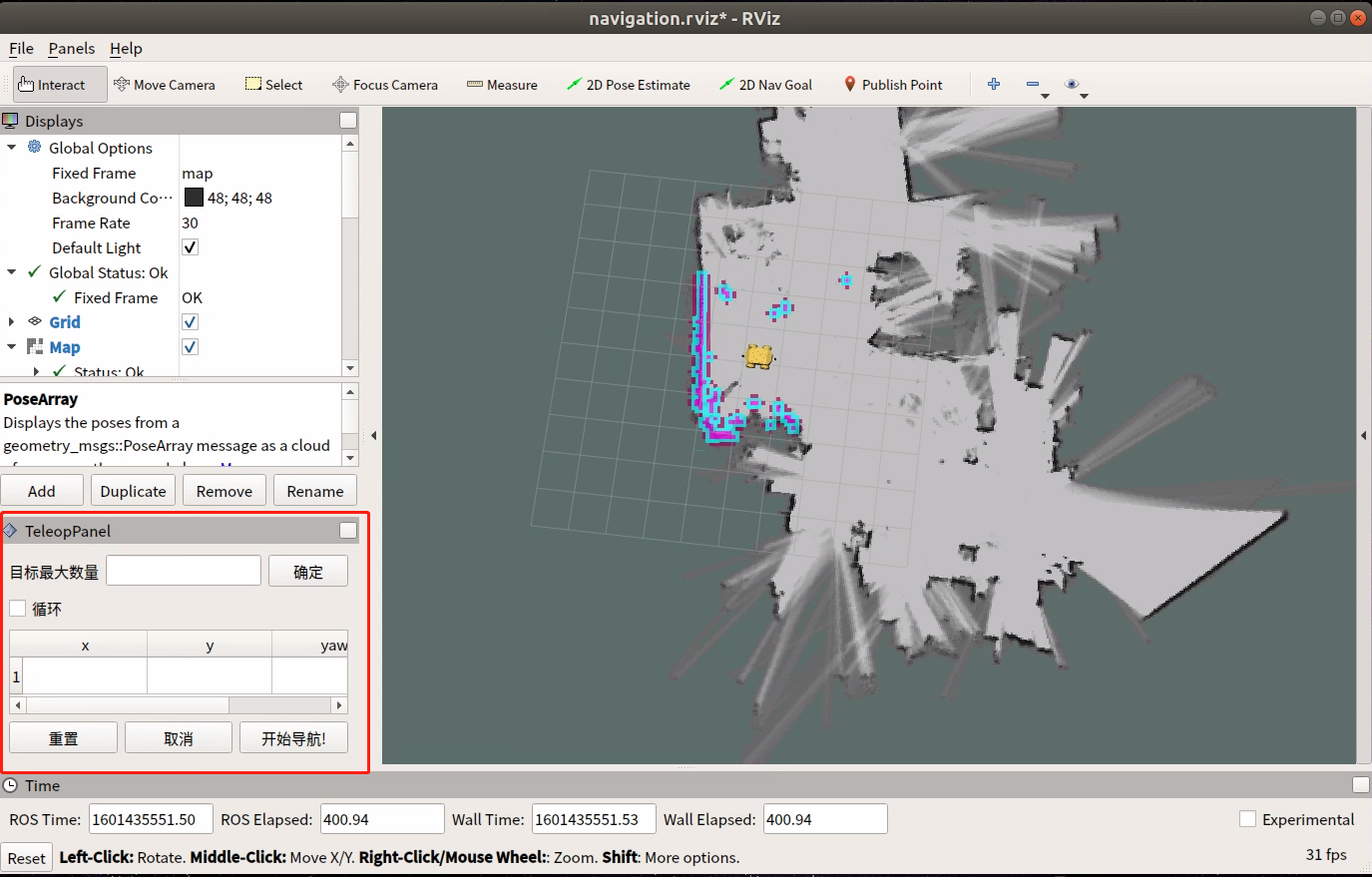
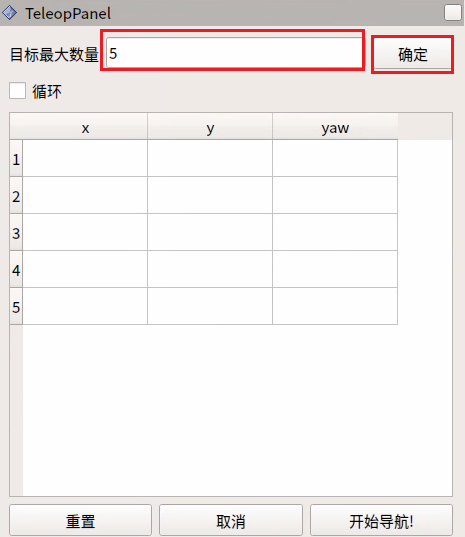
### 操作区说明

① 可设置目标点的最大数量:要求所设置目标点个数不能大于该参数(可以小于)
② 是否循环:若勾选,导航至最后一个目标点后,将重新导航至第一个目标点。例:1->2->3->1->2->3->···,该选项必须在开始导航前勾选
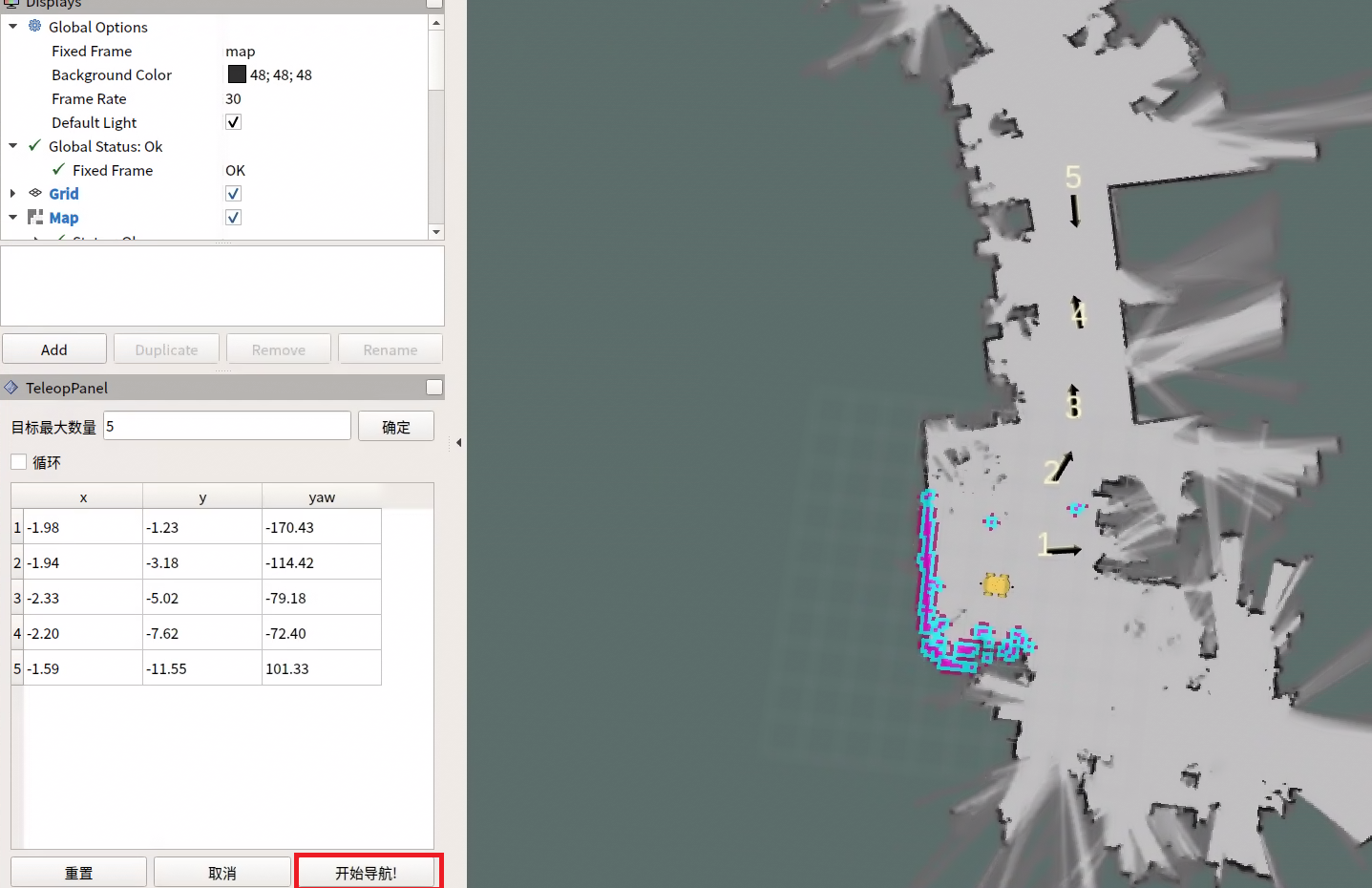
③ 任务目标点列表: x/y/yaw,地图上给定目标点的位姿(xy坐标与航向角yaw)。
* 设置完目标最大数量,保存后,该列表会生成对应数量的条目
* 每给出一个目标点,此处会读取到目标点的坐标与朝向
④ 重置:将清空当前所有目标点
⑤ 取消:取消当前目标点导航任务,机器人停止运动。再次点击开始导航后,会从下一个任务点开始。
例:1->2->3,在1->2的过程中点击取消,机器人停止运动,点击开始导航后,机器人将从当前坐标点去往3。
⑥ 开始导航:开始任务
### 操作步骤说明
#### 1. 初始化机器人位置
点击开始导航,打开 rviz,使用键盘控制机器人运动,当环境特征与地图匹配完成后,机器人会定位到地图中对应的位置。
#### 2. 设置任务
##### 1) 设置任务目标点个数,点击确认保存
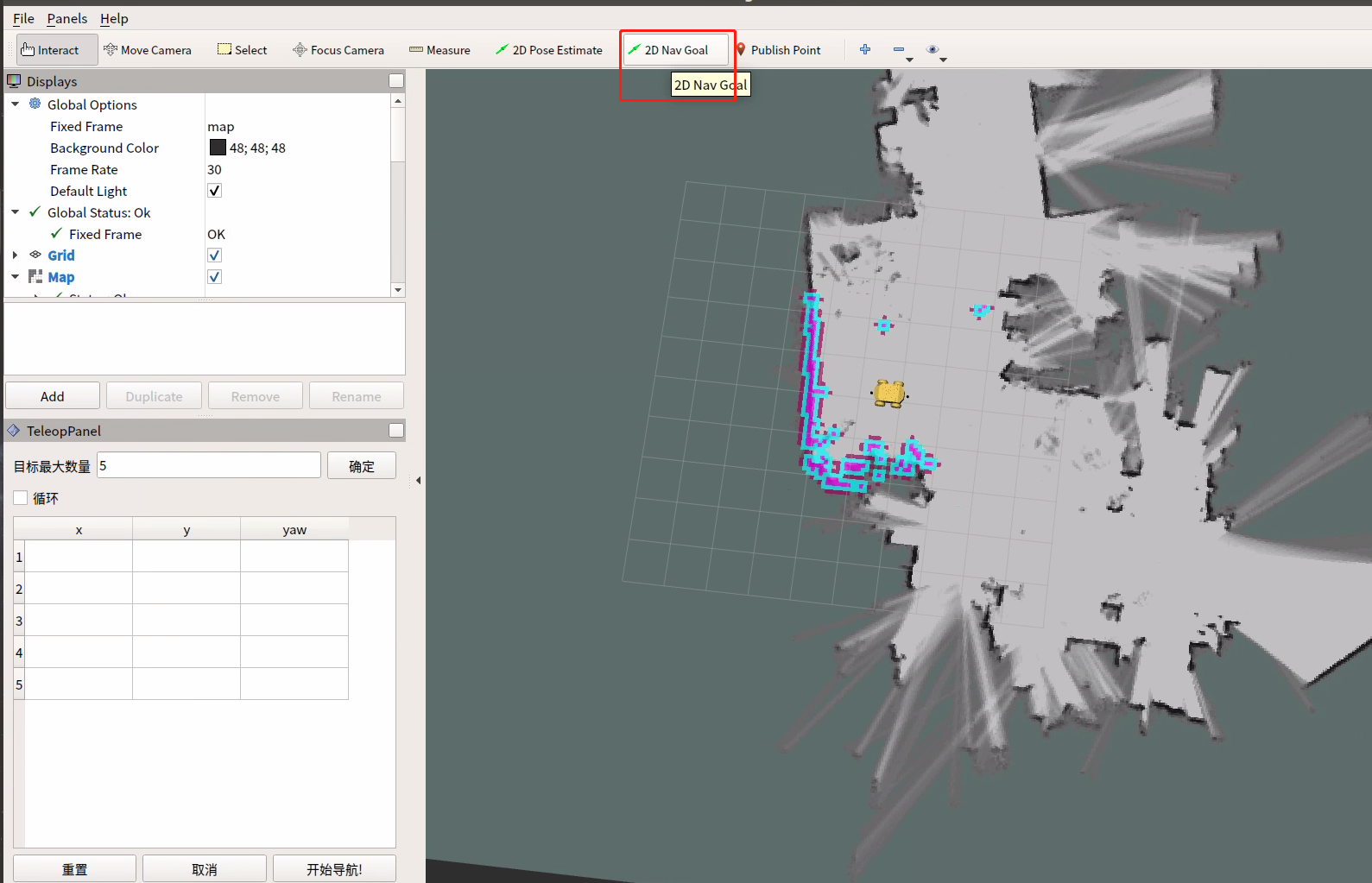
##### 2) 设置目标点
点击ToolBar上的2D Nav Goal,在地图上给定目标点。(每次设置都需要先点击2D Nav Goal)
目标点有朝向区分,箭头顶端为车头方向。
##### 3) 点击开始导航,导航开始
已完成任务会变为红色(如下图)
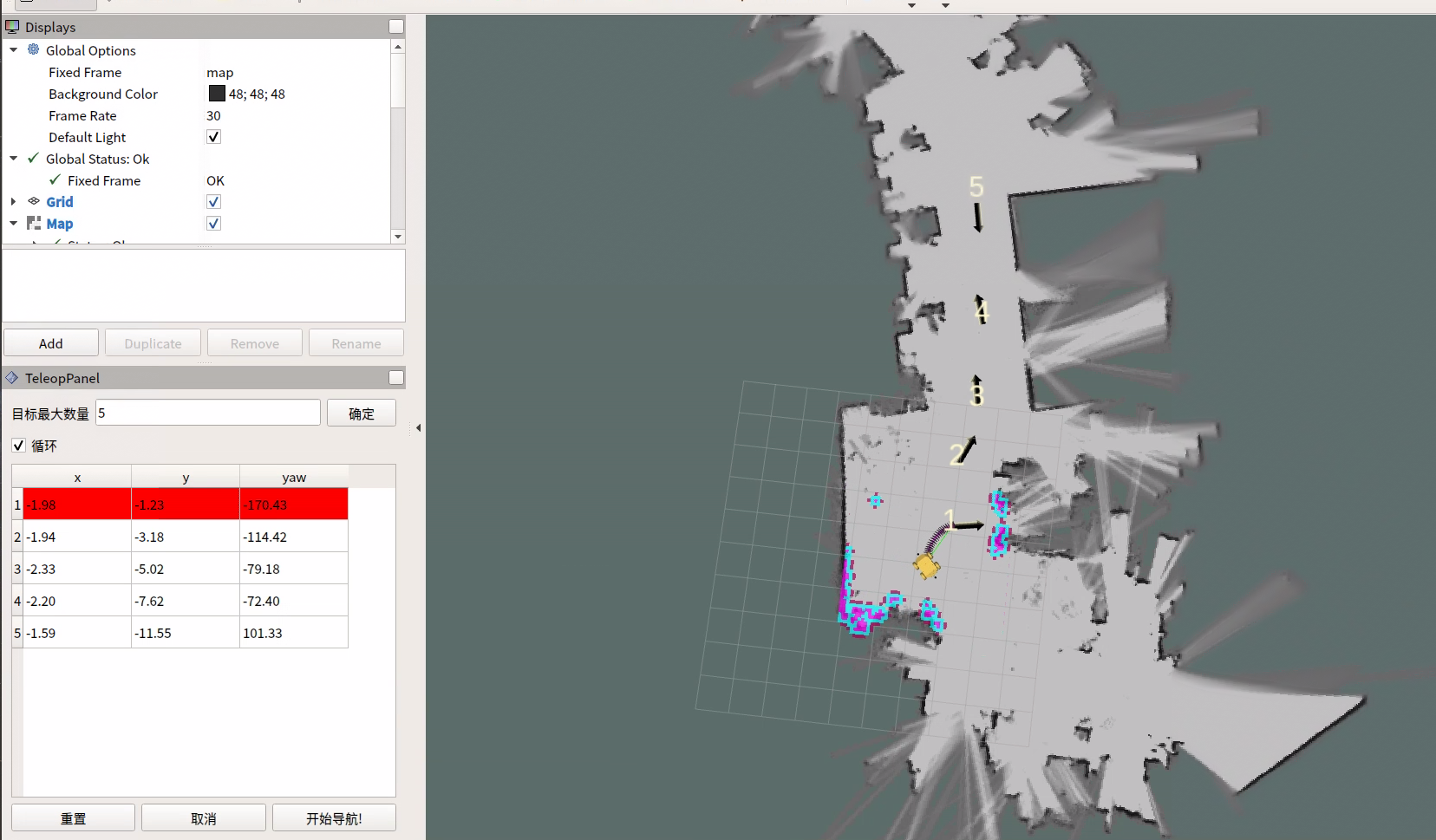
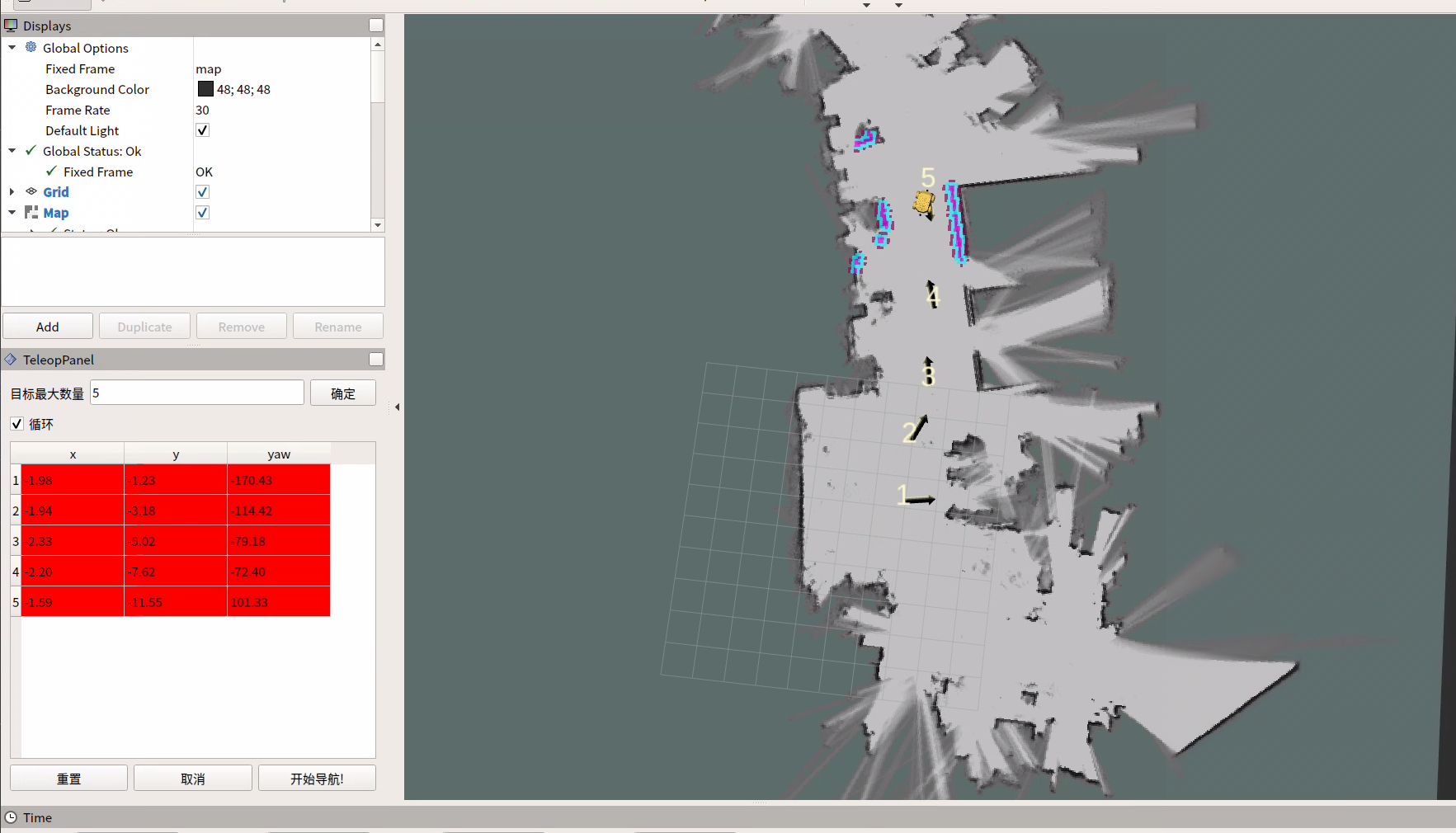
未勾选循环,单次任务完成后停止。
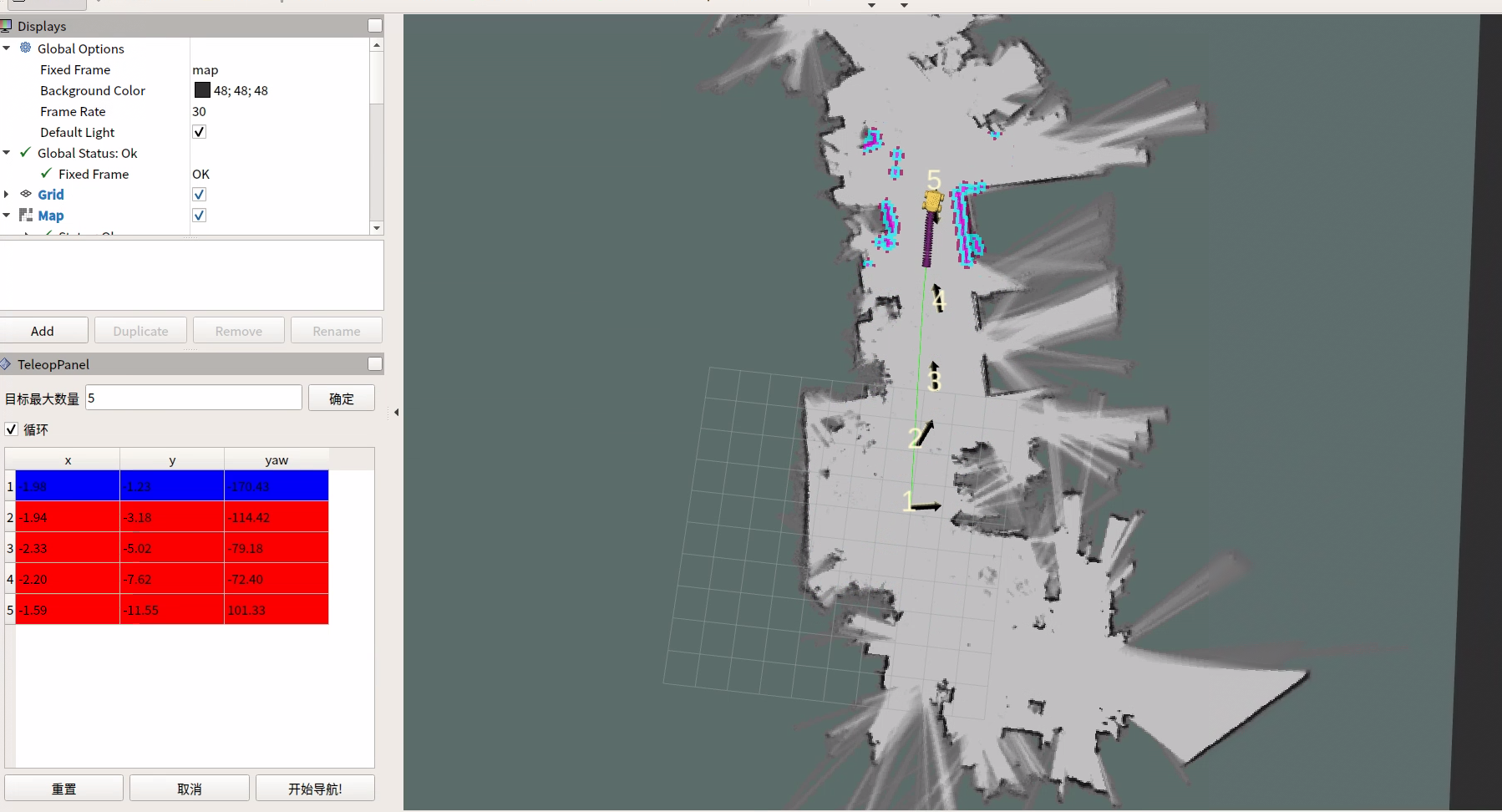
勾选循环,单次任务完成后,会从最后一个目标点到第一个目标点,显示颜色为蓝色。
***
**做完以上操作后 Ctrl + S 保存 RViz 配置,如忘记保存,则下次进来要重复操作。**
### 二、使用
### 操作区说明

① 可设置目标点的最大数量:要求所设置目标点个数不能大于该参数(可以小于)
② 是否循环:若勾选,导航至最后一个目标点后,将重新导航至第一个目标点。例:1->2->3->1->2->3->···,该选项必须在开始导航前勾选
③ 任务目标点列表: x/y/yaw,地图上给定目标点的位姿(xy坐标与航向角yaw)。
* 设置完目标最大数量,保存后,该列表会生成对应数量的条目
* 每给出一个目标点,此处会读取到目标点的坐标与朝向
④ 重置:将清空当前所有目标点
⑤ 取消:取消当前目标点导航任务,机器人停止运动。再次点击开始导航后,会从下一个任务点开始。
例:1->2->3,在1->2的过程中点击取消,机器人停止运动,点击开始导航后,机器人将从当前坐标点去往3。
⑥ 开始导航:开始任务
### 操作步骤说明
#### 1. 初始化机器人位置
点击开始导航,打开 rviz,使用键盘控制机器人运动,当环境特征与地图匹配完成后,机器人会定位到地图中对应的位置。
#### 2. 设置任务
##### 1) 设置任务目标点个数,点击确认保存

##### 2) 设置目标点
点击ToolBar上的2D Nav Goal,在地图上给定目标点。(每次设置都需要先点击2D Nav Goal)
目标点有朝向区分,箭头顶端为车头方向。

##### 3) 点击开始导航,导航开始

已完成任务会变为红色(如下图)


未勾选循环,单次任务完成后停止。
勾选循环,单次任务完成后,会从最后一个目标点到第一个目标点,显示颜色为蓝色。
